|
Mechatronics
Documentation for ME 405 labs
|


|
|
Mechatronics
Documentation for ME 405 labs
|
|
Homework 0x04: Symulation or reality?
This homework builds upon the analysis in Homework0x02 for the balancing ball platform term project. In this step, the state equations previously developed are put into standard form and linearized by finding the Jacobian approximation of the system with respect to the state vector and the input vector (the torque applied by the servo). I adapted Charlie's solution matrix (that was posted on piazza) to take a form similar to the solution I derrived previously. For the purpose of error checking, I used this modified solution. Additionally I was unsure how to adapt the friction factor that was provided in the lab manual. Charlie's solution adds one major assumption:
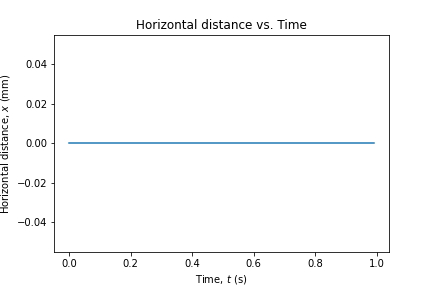
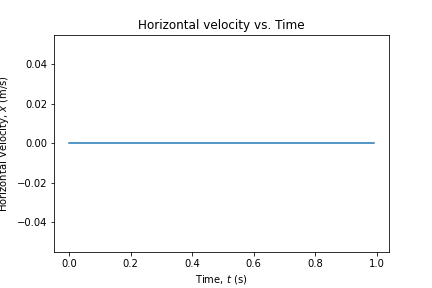
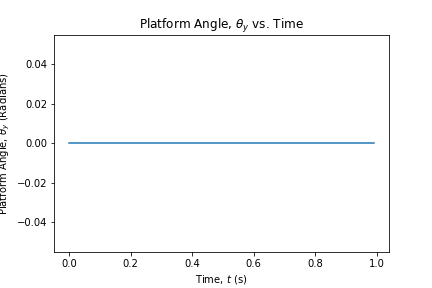
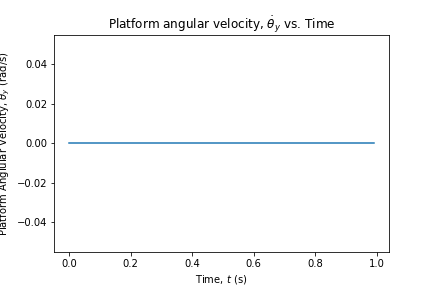
Plots for Part 3a:
| 
|
| 
|
As the ball is located directly above the CG of the platform, it is expected that with no input force, the system should not move. The plots for this first test agree with the intuition that the system shouldn't move.
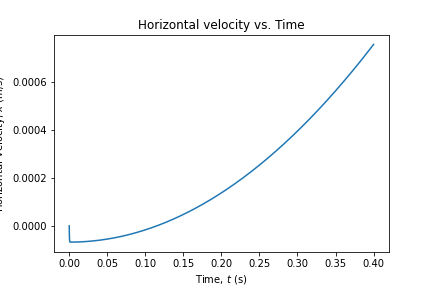
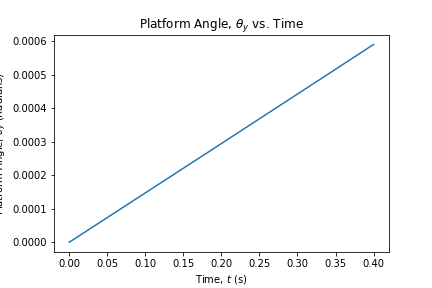
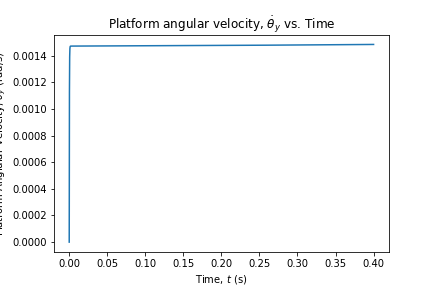
Plots for Part 3b:

| 
|
| 
|
With the all located at the edge of the platform, with no applied force we would expect the ball to roll off to the edge, pulling the platform with it. For the most part this is true according to the output response, however the ball actually rolls back towards the center briefly before continuing. I'm not sure if this is an artifact of the initial condition assumption of the simulation or if it is similar to the counter-intuitive behavior of a spool being pulled at just the right angle. Either way, the bulk behavior is as expected.
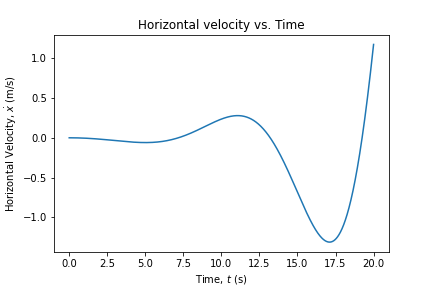
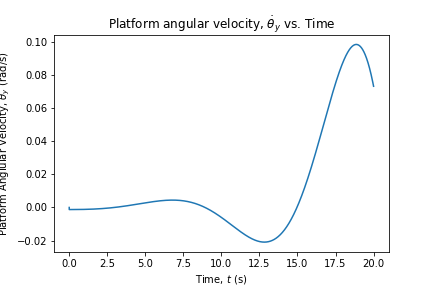
Plots for Part 4:

| 
|

| 
|
This response is a bit confusing, as the system oscillates but at a very high amplitude. Using the iterative Eulerian method to calculate the system response, I had to use a time step of 10^-4s in order to get results that were stable. I did not run the system until it settled, but it does not appear to follow the regulating pattern it should. Because I had to use such a small time step, solution times for simulations longer that 20sec were in the range of 15-20 minutes. In general I would say that assuming the simulation is accurate, either a smaller time step is necessary to account for instability problems in this time regime, or that the controller gains need to be adjusted.
 1.8.17
1.8.17