|
Mechatronics
Documentation for ME 405 labs
|


|
|
Mechatronics
Documentation for ME 405 labs
|
|
Homework 0x05: Full State Feedback
To complete the homework series leading up to the final project, in this last step a controller is implemented on the system to achieve the desired system response. Using the Full State Feedback strategy, the characteristic polynomial is solved for the closed-loop system. The desired characteristic polynomial is also calculated, and system gains are determined by solving the resulting system of equations.
The desired system exhibits a settling time of around 1s with some overshoot acceptable. Because a smaller settling time is preferred, a damping coefficient of sqrt(1/2) was chosen as this is optimal for a PT2 system. Because the system is 4th order, poles were selected so that there is a dominating complex PT2 system along with two significantly larger poles, chosen arbitrarily around 10x greater than the complex poles.
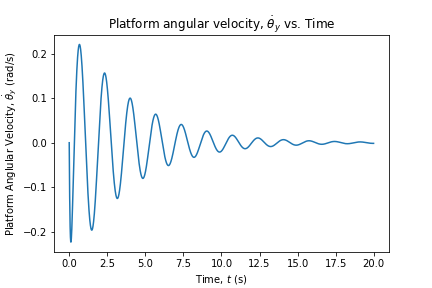
The new characteristic polynomial of the system was verified (see notebook) and then simulated with the same conditions used in Homework0x04 . Below are the results:
Plots from old Homework0x04 controller response:

| 
|

| 
|
Note that the solution from Homework0x04 appears different as I found an error there and fixed it for this assignment. I was using the wrong units for the friction coefficient, causing the system to be unstable.
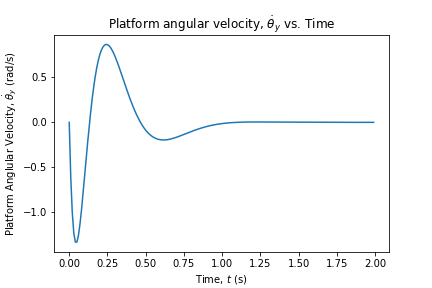
Plots from new controller response:

| 
|

| 
|
Note: The time scale for these plots is much smaller to show more detail.
 1.8.17
1.8.17